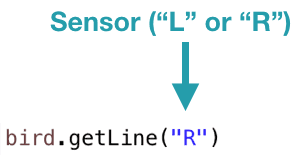

The Finch contains two line sensors on the bottom of the Finch on either side of the on/off button. They are infrared sensors that emit infrared radiation and measure the amount reflected by the surface below the Finch. You can use these sensors to detect whether each sensor is over a white surface or a black surface.
Register to receive free access to all teacher materials.