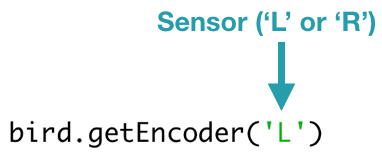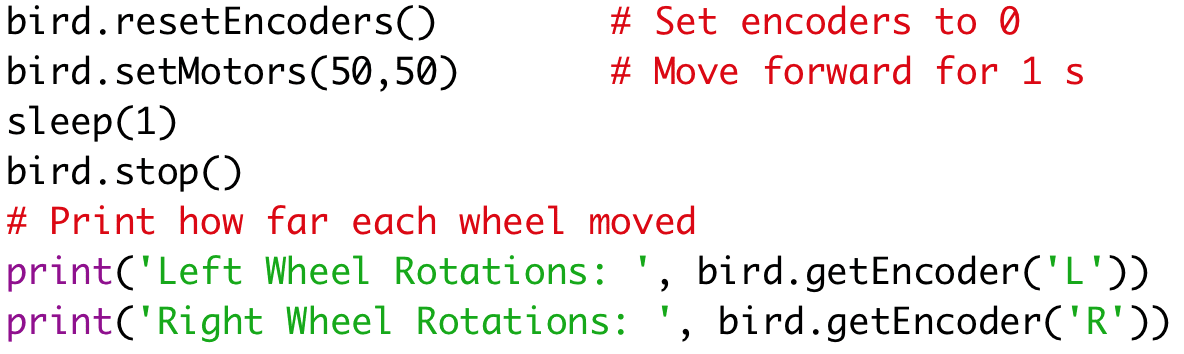

You have learned to use a number of Finch sensors, like the light sensors, that measure something about the environment around the Finch. The Finch also contains two sensors, called encoders, that measure information about the Finch itself. The encoders are part of the Finch wheels, and each encoder measures how far one of the wheels has turned. The setMove() and setTurn() methods use the encoders to determine when the Finch has completed the desired movement. In this lesson, you will learn to use the encoders directly to measure how far the Finch has moved or turned.
Register to receive free access to all teacher materials.