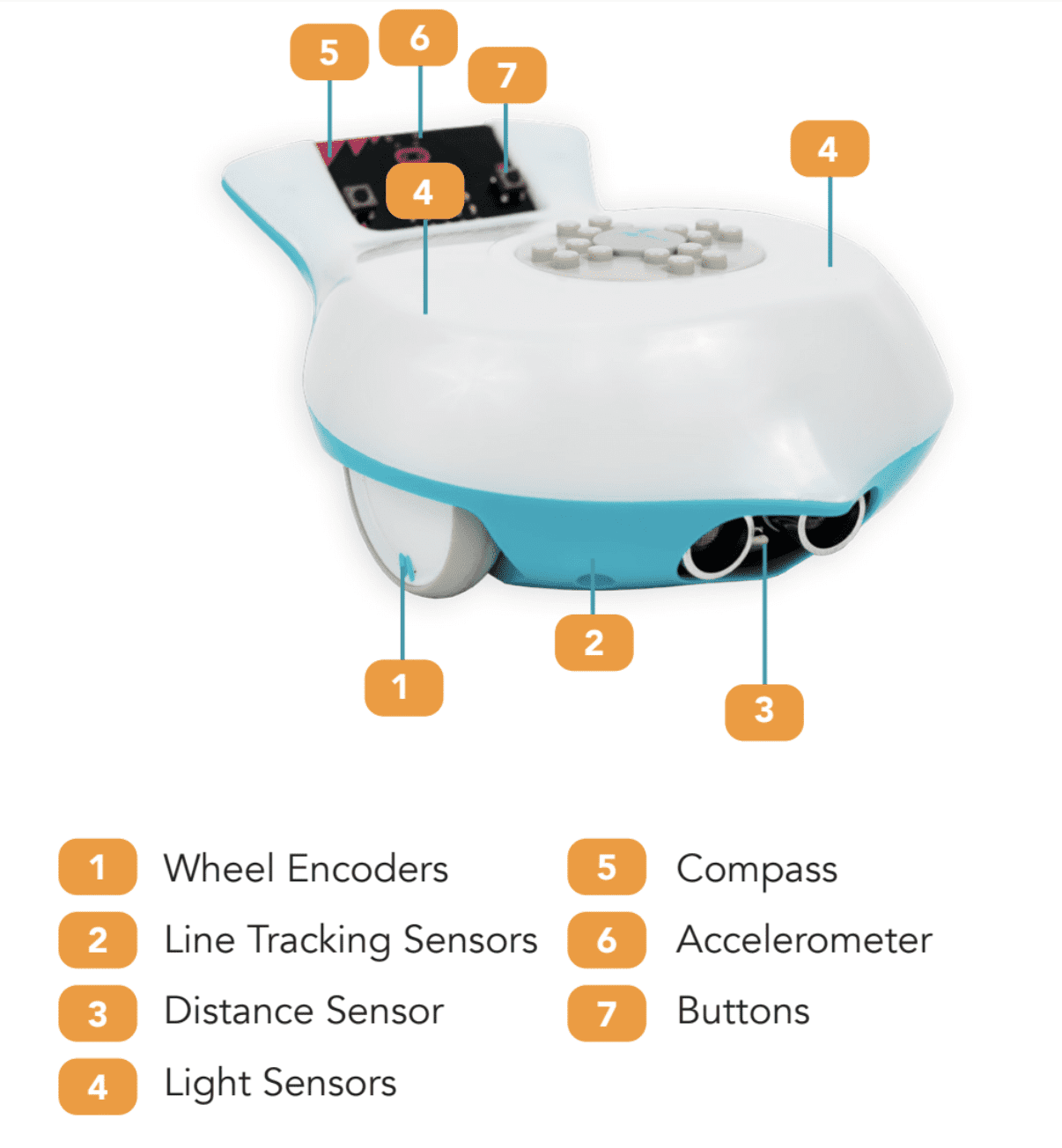

In the last lesson, you learned to make the Finch move and turn. This uses the motors in the wheels, which are Finch outputs. Outputs are ways that the Finch can act on the world or communicate with the user; they include the motors, lights, and buzzer. The Finch also has inputs called sensors. The sensors collect data about the environment around the Finch and provide this data to your program. In this lesson, you will explore some of the kinds of data that you can collect with the Finch sensors.
Register to receive free access to all teacher materials.