

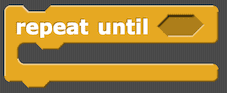
In the last lesson, you learned to create Boolean blocks with the Finch sensors. You used these blocks in the if, if else, and wait until blocks. In this lesson, you will learn to use one more decision block and to write programs that make more complicated decisions. As your programs become more complex, remember that you will need to spend time carefully planning what a program should do and how it should do it.



Register to receive free access to all teacher materials.