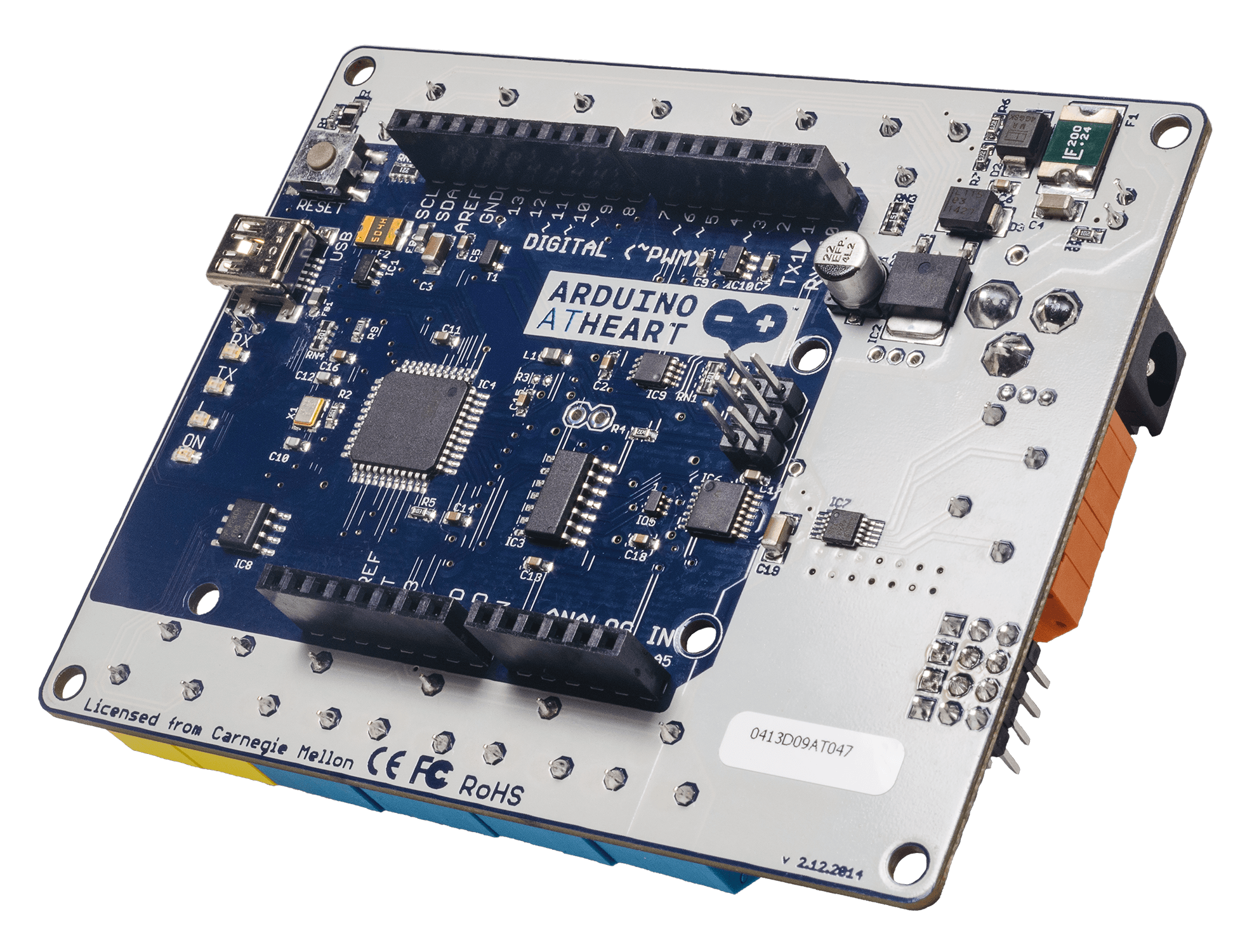


1. First, use the Hummingbird Firmware Burner to put your Hummingbird Duo into Arduino mode.
2. Install the Arduino IDE.

3. Run the Arduino IDE one time – simply open and close it. This may seem odd, but the first time Arduino launches it creates a number of folders that are necessary for our installation utility to operate properly.
4. Download and extract the Hummingbird Arduino files.
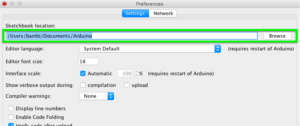
5. Locate your Arduino Sketchbook folder. Open the Arduino IDE and go to File->Preferences (Arduino->Preferences on a Mac). In the resulting menu, make note of the path to the Sketchbook IDE:
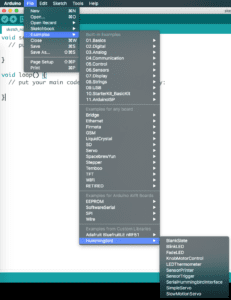
6. Copy the libraries and hardware directories into the Arduino Sketchbook folder. If you already have existing folders named libraries, hardware, etc in the Sketchbook folder, then merge the contents of the folders.
7. WINDOWS-ONLY. Go into the WindowsDrivers folder and double click runDriverInstall.bat.
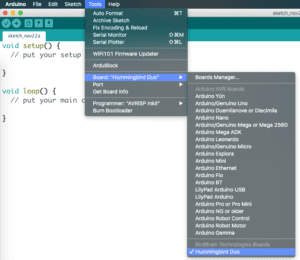
8. Restart the Arduino IDE.