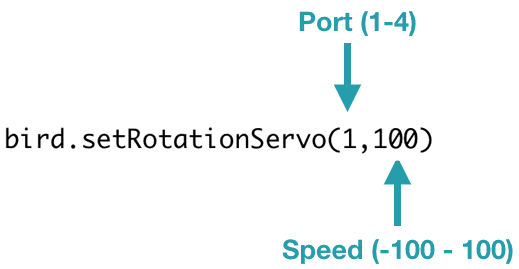
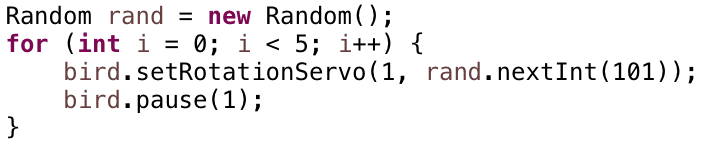
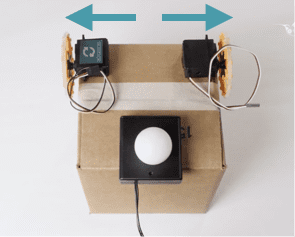
In the previous lesson, you learned to use the position servo, which moves to a particular angle. In this lesson, you will learn to use the rotation servo. The rotation servo is a motor that can rotate at different speeds.
Register to receive free access to all teacher materials.